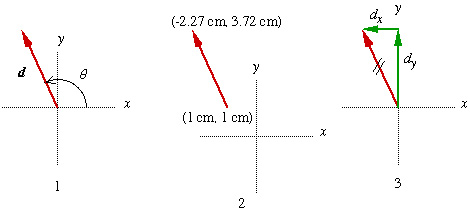
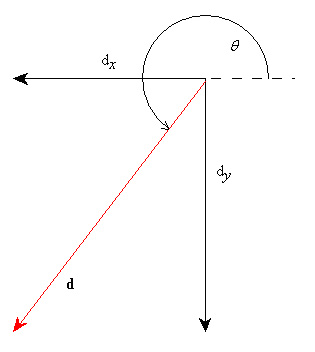
I. You can describe a , for our purposes, in three ways, as illustrated below.
1. Describe by giving magnitude (number and unit) and direction
(angle measured counterclockwise from +x axis).
Here, d = 3 cm at 115o.
(Note: The "tail" of the vector need not be located at the
origin.)
2. Describe by giving the x and y coordinates of the "head" and "tail" of the vector.
3. Describe by giving the components of the vector. Here:
dx = dcosq
= (3 cm)(cos115o) = -1.27 cm dy
= dsinq
= (3 cm)(sin115o) = 2.72 cm
(d is
the magnitude, i.e., absolute value, of the vector d.)
For clarity in
a vector diagram, two lines are drawn through a vector when it is
replaced
by its components.
II. The negative of a
vector
has the same magnitude as the original vector, but the direction angle
is rotated 180o.
In the
example illustrated above, - d = 3 cm at 295o.
III. Vector addition.
2. To add two or more
vectors analytically,
(a)
calculate
the components of each vector,
(b) find
the sums of the x and y components,
(c) use
the Pythagorean theorem to find the magnitude of the resultant (sum),
(d) use
the inverse tangent function to find the direction angle of the
resultant.
Example. Find the sum of d1 = 3 cm at 115o, d2 = 4 cm at 38o, d3 = 3 cm at 180o.
The
three
vectors are drawn below, along with the vector sum. You can see that
the
resultant R can be obtained
by adding
the vectors in any order: d1 + d2
+ d3 = d3 + d1
+ d2 . Vector
addition
is commutative.
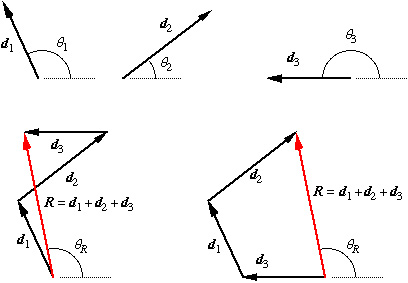
The careful use of ruler and protractor should give: R = 5.30 cm at 102o.
The sum is calculated. It is a good idea to carry an extra significant figure.
d1x = 3cos115o =
-1.268 d1y
= 3sin115o= 2.719
d2x = 5cos38o =
3.152 d2y
= 5sin38o = 2.463
d3x = 3cos180o
= -3
d3y = 3sin180o = 0
Rx
= Sdx=
-1.116
cm Ry
= Sdy=
5.182 cm
R = [(-1.116 cm)2 + (5.182 cm)2]1/2
= 5.30 cm
qR
= tan-1(5.182/-1.116) = 102o
IV. Vector subtraction
Subtracting d2 from d1 is the same as adding d1 and -d2.
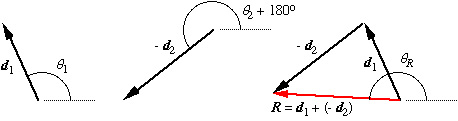
d1x = 3cos115o
=
-1.268
d1y = 3sin115o= 2.719
- d2x = 4cos218o
= - 3.152 -
d2y
= 4sin218o = - 2.463
Rx = -
4.420
Ry = 0.256
R = 4.43 cm at 177o
If the resultant is not in the first quadrant, as in this example, the following procedure may be used to find the angle of the resultant vector.
1. Find the inverse tangent of the absolute values
of
the components: 
2. Find the angle of the resultant, qR,
as indicated on this table.
|
|
|
|
qR |
|
|
|
|
|
|
|
|
|
qR = 180o - q |
|
|
|
|
qR = 180o + q |
|
|
|
|
qR = 360o - q |

INVERSE TRIG FUNCTIONS ON THE CALCULATOR
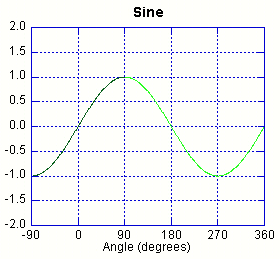
If you set your calculator to degrees and ask it
to find the
inverse sine of0 .5, that is to find the angle whose sine is 0.5, your
calculator should display 30o. That is,
the angle whose sine is 0.5 is 30o. Now ask it to find
sin(180o
–30o). You can see that the sin(150o) is also
0.5. Apparently,
your calculator “knows” how to calculate the sine of an angle greater
than 90o,
but will not return a value for the inverse sine greater than 90o.
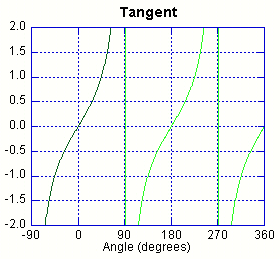
Now look at sin-1(-0.5). Your calculator will give you –30o.
Now
look at sin(210o) and sin(330o). The sines of
these
angles are also -0.5.
It looks like your calculator will always return inverse sine values
between –90o
and 90o for any numbers between -1 and 1.
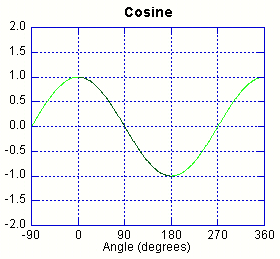
Similar problems
occur when you look for the inverse cosine and the inverse tangent.
|
This is a limitation of the calculator you will encounter when working problems involving vectors. Here is an example. Suppose the components of a displacement vector are given as: dx = –3 and dy = –4. If you draw these components you can see that the corresponding vector d has a magnitude of 5 units. You can also see that this vector lies in the third quadrant; the direction angle is between 180o and 270o. However, if you ask your calculator for tan-1(-4/–5)
you will see 53.1o, an angle in the first quadrant! The
graphs shown
below indicate the range of operation (the darker portions of the
curves) of a
calculator for taking the inverse trig functions. The table in the previous section shows how
to change the angle given by your calculator when the vector in
question is not in the first quadrant. |
 |
 |
 |
 |
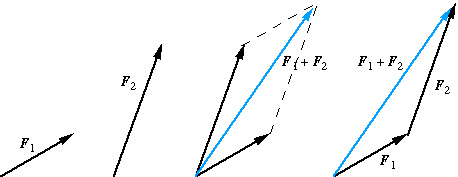
For convenience, to help clarify diagrams, it is allowable to "move" a vector parallel to itself.
Suppose two forces are specified: F1 = 3 N at 20o, F2 = 5 N at 70o.
The resultant force is R = 7.55 N at 55.2o. (You should be able to do this calculation.)
The vector diagram, in this case, is clearer if both
vectors
originate at the point where they are applied.
This is a good way to represent velocities, accelerations or concurrent
forces.
The vectors are joined tail-to-tail and the resultant is the diagonal
of the paralellogram, as shown here.
You can see that the two methods are equivalent.
VI. Worked Example - Vector Components and Equilibrium
A bird feeder that weighs 160 N
is supported by three cables, as shown here. Calculate the tension in
each cable.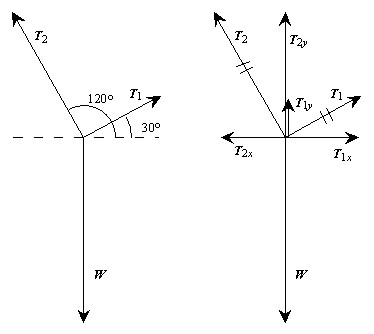 |
 |
