Written Homework: should be submitted to Course Online Site
Site: http://col.cdm.depaul.edu
Discussion Forum: I will check, but not necessarily monitor. If
you have specific questions, it is still better to email me. I may
post comments on the discussion forum if a topic is of appropriately general
interest or concern.
Assignments: will be posted on the
Course Online. Comments and grades will also be posted there.
Due Dates: Online Learning section
due dates will generally be 1 day later In Class section(s).
Email: Starting with the first class, I will check email
regularly. Emails received on day x should have responses by the
end of day x + 1.
Office Hours: 4:00 - 5:30 Tu and by appointment. Visit,
email, or phone me during this time.
Office Phone: 312-362-8718. But if you
don't get me, you may leave a message and it will be sent to my email.
Operating Systems: Software to
facilitate running programs on some hardware. But how
is operating system software different from other complicated systems such as
compilers, editors, integrated development environments, etc.
Operating system code is event driven; that is, o.s. code
executes in response to events rather than being executed directly
the way a compiler is.
Approach 1: Could study the general
concepts that most operating systems have in common. That is,
abstract away many of the details.
Approach 2: Examine general concepts,
but then probe how they are implemented in a real
operating system.
We will attempt to take the second approach.
What real OS? Until recently,
details (e.g., source code) of Windows, not available.
Linux source available is available, and a good deal of
examination and explication of its structure.
Both are committed to be robust, production operating
systems.
This goal tends to make a full understanding of how various
components work together quite opaque.
Minix: Minix was developed by Andrew
Tanenbaum and released in 1987. Its name stands for mini-UNIX,
with the goal of looking and working like UNIX, but being small
enough so that one could understand how it works.
Subsequently, the IEEE organization published a standard for
UNIX systems called POSIX. Minix has since evolved toward the new
standard.
Linux: Linus Torvalds got a copy of
Minix, installed it and made modifications to suit his needs.
Eventually, after writing device drivers and a file system, he
had the basis for the kernel of what was to become
Linux.
The Linux development emphasized performance and its internal
design is monolithic and not at all like that of
Minix.
Minix development has recently placed emphasis on building a
reliability, and its structure remains much more transparent.
Application programmer perspective: write programs that make system
calls. View the OS as an application interface.
Operating system perspective: implementation of abstractions
including the API of system call functions available to
application programmers.
Using System Calls Example (a shell)
- The shell process reads a command from the user (the read waits for input)
- Creates a child process to execute the command
- The child loads the program and executes it, while
- the parent (the shell) waits for the child to finish
Applications view OS services as obtainable through a library of functions.
Needed:
- Create process
- Have process execute a particular program
- Wait for the process to terminate
Need: Interrupt a process during its normal execution.
- Waiting for a child. The child has terminated.
Send a
signal to the parent.
- A process is taking too long.
Send a terminate signal.
- System is shutting down.
Send a terminate signal to all
processes.
- Wait for a specified amount of time before
continuing.
Sleep and wait for a signal to wake up.
<stdio.h>
<stdlib.h>
<signal.h>
<unistd.h>
void handler(int n)
{
printf("I'm melting ....\n");
exit(0);
}
int main(int argc, char* argv[])
{
int n = 0;
signal(SIGALRM, handler);
alarm(2);
while(1) {
printf(".");
if ( ++n % 30 == 0 ) {
printf("\n%d ", n);
}
}
return 0;
}
- How does this program terminate? or does it?
- Who sends the SIGALRM signal to this process?
Systems are more flexible if they carefully separate:
The implementation of the mechanism of making system calls such
as fork, execvp, etc. is radically different in Linux versus
Minix and illustrates two distinct designs.
char buffer[N];
int nread; /* Assuming type ssize_t is defined as int */
nread = read(fd, buffer, nbytes);

1 - 4: user calls c library read routine
- 5: read library routine doesn't read; it executes in user
mode, puts the system call number for read in a register and
executes a trap.
The system trap handler takes
over executing in kernel mode.
- 6 - 8: The kernel routine uses the value in the register to
switch to the appropriate routine to execute the read system
call (do_read) on behalf of the user (still in kernel mode)
copying the data into the user's buffer variable.
9: kernel routine returns from the trap call (a special
return) that restores the processor to user mode as well as
returning to the user routine.
- 11: The user level read library routine returns to the user.
In this monolithic design, the "kernel" contains all of the operating
system code that will execute in privileged (kernel) mode in one
compiled address space.
However, the functions it contains are not called from a
main but are typically invoked through the system call
mechanism just described as needed by different user processes..
Although in a monolithic design, the compiled image is one big
glob, the functions can still logically have a "layered"
structure.
| User level processes |
| System call routines |
Lower level routines
used by the system call routines |
In the monolithic design, all the operating system functions compiled
into one address space and is effectively part of each user
process.
A system call in the monolithic case results in a mode
switch from user mode to kernel mode, but is not a
context switch to a different process.
The user's memory address is still usually directly
accessible.
Linux has a monolithic design structure.
Minix uses a client server design.
It has a small kernel - routines that are compiled and linked
together in one image.
Device drivers are NOT part of the kernel.
File "servers" and process "server" are also not part of the
kernel.
The device drivers and servers execute in their own separate address
spaces.
The kernel implements a message passing facility.
System calls must use this message passing to
communicate with the appropriate server.
Each design still implements the process abstraction.
We will first look at some aspects of this abstraction, before
examining its implementation.
The usual definition of process is: a running
program
In order to switch the processor from one process to another,
the operating system must be able to save the
state of the current process and to restart it in the same state when it
switches the processor back to this process.
What constitutes the state of a process?
- which instruction is next
- memory where the program code and data is located
- values stored in registers
- files it has open
- which process created it
- is it running or waiting for some resource
- ...
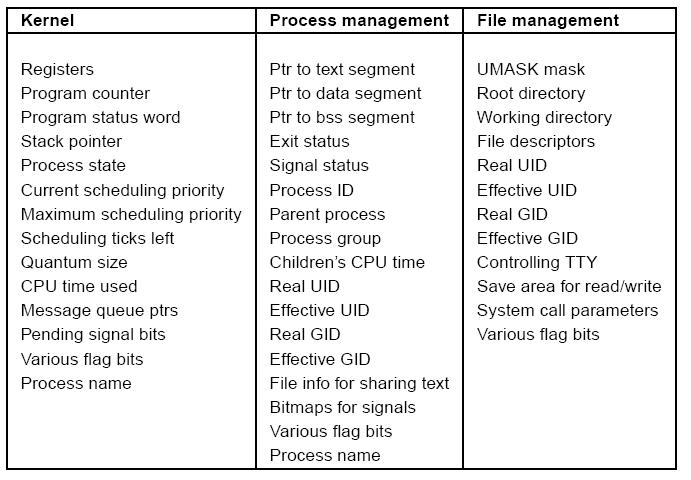
Each process has an entry in a process table to hold
this information about the process.
This table must be accessible to the operating system code,
but protected from user processes.
The dual mode of a processor can support this.
For a dual mode processor, some register has a bit that
determines the current mode of the processor.
We'll refer to these two modes generically as user
mode and kernel mode.
If the processor is in kernel mode, then all machine
instructions for the processor can be executed.
In user mode, some of the instructions will "trap" and not
execute. These are called privileged instructions.
The term kernel will refer to the operating system code or at
least to the part that does the work that requires extra privilige.
The mode of the processor should be user when user code
is executing and kernel mode when kernel code is
executing.
A process has a state property whose value changes and at any
time provides some information about the current activity of the process.
A simple set of possible values of process state is
{ READY, BLOCKED, RUNNING }
The process can itself cause changes of its state. E.g., [2] A RUNNING
process makes a system call to request some operating system service
causing its state to become BLOCKED until [3] the service is made available.
[1] The operating system can cause the state of a READY process to become
RUNNING by scheduling that process to execute.
If the operating
system can get control of the cpu, it can also [4]
preempt the cpu from the previously running process, sending it
back to the READY state and select a different process to run.
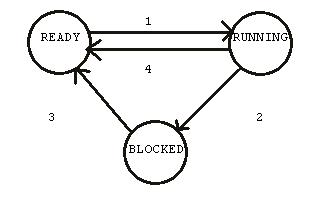
- Running -> Blocked
- Running -> Ready
- Ready -> Running
- Blocked -> Ready
Events:
- timer interrupt
- Running process makes a system call
- A system call completes (e.g. a resource becomes
available)
Scheduler: Handles transition 3. But
note that transition 4 goes from Blocked to Ready, not Blocked to
Running.
This typically gives more chance of implementing whatever
scheduling policy is desired.
In Minix, three separate modules manage interprocess communication,
memory, and file resources.
The process table is partitioned into three parts, with each
part being managed by one of the modules
A system call by a user process (executing in user
mode) executes some operating system function on behalf of that user
process.
To the programmer, calling a system function looks like
calling any user written function: pass parameters, get a return
value back.
But the code that is linked to the user program has to
somehow bridge the gap between user mode to kernel mode at the
call and back to user mode on return.
That's all the linked code does.
Note: There can't be a way for user code to change the mode
to kernel and still be executing user code!
The actual kernel code that does the work of the system call
is never linked into the user program.
The Minix operating system has kernel code and data, but also a number of
operating system processes it calls server
processes which have their own memory and code, but don't
have direct access to the kernel data/code.
Two Minix server processes
- Process Manager
- FileSystem
The server processes execute in user mode.
Kernel code does the critical steps for system calls; that
is, the steps that require kernel mode privilege.
Some parts of a system call may be handled by one or more of
the operating server processes.
Sounds complicated!
The Minix kernel provides a message passing facility.
For user mode processes (user processes and server
processes), sending or receiving a message is a system call.
It is the only system call that doesn't itself
use message passing.
User processes make Minix system calls by sending a message
to the appropriate Minix server process.
Server processes can handle some system calls by themselves
because the server process has all the information needed in
its address space and can execute its code for the system call
in user mode.
Minix has two other "processes" besides the server processes,
but they are called "tasks":
In contrast to the server processes, the tasks run in kernel
mode and have access to all the kernel data structures and
code.
That is, the clock task and the system task share the
kernel address space, but each one has its own call stack and is
scheduled as separate processes.
A user makes a system call by passing a message and receiving
a reply from a Minix server process.
The Minix server process either handles the system call and
replies on its own in user mode or else sends a message to the
Minix System Task and gets a reply.
User processes can send messages to Minix server processes
using this function:
int syscall(int who, int syscallnr, message *msgptr);
- who identifies which server process
- syscallnr is the number of the system call function
- msgptr should contain the address of a message struct
containing parameters for the the system call.
The syscall function is just a library function that can be
linked into user mode programs.
It executes in user mode.
What does it do? Not much.
It calls another function:
int sendrec(int who, message *msgptr)
Ok, so how does the message really get sent?
This function is in assembly code, not C:
__sendrec:
push %ebp
mov %esp, %ebp
push %ebx
mov SRC_DST(%ebp), %eax ! eax = dest-src
mov MESSAGE(%ebp), %ebx ! ebx = message pointer
mov SENDREC, %ecx ! _sendrec(srcdest, ptr)
int SYSVEC ! trap to the kernel
pop %ebx
pop %ebp
ret
The routine pushes arguments on the stack and then executes
the int machine instruction with operand SYSVEC, which
is just an integer identifying an entry in the interrupt
vector table.
This instruction int is an instruction (software), but
has the effect of a hardware interrupt.
In particular it saves part of the state of the current
process and loads the program counter (register eip) and the
flags register for a kernel routine that handles all
system calls.
Important! This switches from user mode to kernel
mode, but also from user code to kernel code.
The int instruction can't be used to somehow magically
switch to kernel mode but to user written code.
- fork
- execvp
- waitpid
- exit
- getpid
- getppid
- kill
- signal
Unix (and Linux and Minx) use signals to notify a parent that
a child has terminated. Signals are also used for keyboard
interrupts, to terminate another process, etc.
The kill system call is used to "send" a signal from one
process to another.
A few of the symbolic names for the integer signals:
pid_t fork();
- Creates a new process - the child
- Child process gets a copy of code and data of parent
- Child and parent both continue at the return from fork()
call
- fork returns 0 to the child (if it succeeds)
- fork returns the pid of the child to the parent
1
2 #include <stdio.h>
3 #include <stdlib.h>
4 #include <unistd.h>
5 #include <sys/wait.h>
6 #include <signal.h>
7
8 int main(int argc, char* argv[])
9 {
10 pid_t n;
11 int i;
12
13 n = fork();
14 printf("fork returned %d, my pid is %d\n", n, getpid());
15 printf("pid %d: Hello\n", getpid());
16
17 return 0;
18 }
What is the output?
How many processes?
Which process finishes first?
int exit(int status);
- A SIGCHLD signal is sent to the parent process.
- This process is terminated and all memory is released,
any open files are closed
- If the parent hasn't waited for this child, the process
table entry remains and holds the exit status value and this
process becomes a zombie.
- If this process has any zombie children, they are deleted
completely.
- If this process has any children that have not terminated,
each child is "adopted" by the init process.
int execvp(char * filePath, char * args[])
int execlp(char *filePath, char * arg0, char * arg1, ..., 0)
- replace this process's program by the executable file
given by filePath
- for execvp the array should have 0 in the last entry; the
non-zero entries are counted and passed to the main routine of
the new program as the value of argc (number of command line
arguments) and args is passed to main as the array of command
line arguments
- for execlp each command line arguments is passed as a
separate parameter and the last parameter should be 0. The
non-zero parameters are counted and passed as the value of
argc to the main function of the new program.
1
2 #include <stdio.h>
3 #include <stdlib.h>
4 #include <unistd.h>
5
6 int main(int argc, char *argv[])
7 {
8 char ch = 'X';
9 int i;
10
11 if ( argc >= 2 ) {
12 ch = argv[1][0];
13 }
14
15 printf("argc = %d\n", argc);
16 for(i = 0; i < argc; i++) {
17 printf("%s ", argv[i]);
18 }
19 printf("\n");
20
21 printf("pid %d: %c\n", getpid(), ch);
22 if (ch == 'X') {
23 return 0;
24 } else if (ch == 'A') {
25 return 1;
26 } else if (ch == 'B') {
27 return 2;
28 } else if (ch == 'C') {
29 return 3;
30 } else {
31 return 99;
32 }
33
34 }
pid_t waitpid(pid_t pid, int *status, int option)
If option is 0,
- If pid is -1, wait for any child process to terminate
- If pid > 0 wait for a specific child to terminate
- The integer pointed to by status will be filled with bits
indicating how the process terminated and the
exit value if the process terminated normally.
It is also possible to wait for a child that has stopped by
setting option to the appropriate value.
If no unwaited for children exist, waitpid returns -1
without waiting.
1
2 #include <stdio.h>
3 #include <stdlib.h>
4 #include <unistd.h>
5 #include <sys/wait.h>
6 #include <sys/types.h>
7 #include <signal.h>
8
9 int main(int argc, char* argv[])
10 {
11 pid_t pid;
12
13 int status;
14 char str[32];
15 printf("Enter a letter: ");
16 scanf("%s", str);
17
18 if ( (n = fork()) == 0 ) {
19 execlp("printCh", "printCh", str, (char *) 0);
20 printf("Unable to execute printCh\n");
21 exit(0);
22 }
23
24 pid = waitpid(-1, &status, 0);
25 if ( WIFEXITED(status) ) {
26 printf("child %d exited with status = %d\n", pid,
27 WEXITSTATUS(status));
28 }
29
30 return 0;
31 }
- Straight foward copy is time and space consuming
- Different processes should be able to share the read-only
code (not the data) segment.
Rather than copying a program into a process's address space, a
better choice is to map the program file into the address
space.
void *mmap(void *start, size_t length, int prot, int flags,
int fd, off_t offset);
- start - just a suggestion to the operating system. Use
0.
- length - size of the file in bytes! (see stat or fstat functions)
- prot
- PROT_EXEC Pages may be executed.
-
PROT_READ Pages may be read.
-
PROT_WRITE Pages may be written (and read).
-
PROT_NONE Pages may not be accessed.
-
flags
(source)
1
2 #include <stdio.h>
3 #include <stdlib.h>
4 #include <unistd.h>
5 #include <fcntl.h> // open and O_RDWR
6 #include <sys/stat.h> // struct stat
7 #include <sys/mman.h> // mmap, munmap, ...
8
9
10
11
12 int main(int argc, char* argv[])
13 {
14 int fd = open("test.bak", O_RDWR);
15
16 if ( fd < 0 ) {
17 fprintf(stderr, "Cannot open input file test.bak for update\n");
18 exit(1);
19 }
20 struct stat s;
21
22 fstat(fd, &s);
23
24 char *buf;
25
26 buf = mmap(0, s.st_size, PROT_WRITE, MAP_SHARED, fd, 0);
27
28 if ( buf == (void *) -1 ) {
29 fprintf(stderr, "mmap failed size = %lu\n", s.st_size);
30 exit(2);
31 }
32 int i;
33 printf("\nInitial test.bak contents:\n\n");
34 for(i = 0; i < s.st_size; i++) {
35 printf("%c", buf[i]);
36 }
37
38 // Reverse the characters in the file
39 char ch;
40 int j = s.st_size - 1;
41 for(i = 0; i < s.st_size / 2; i++, j--) {
42 // swap buf[i] and buf[j]
43 ch = buf[j];
44 buf[j] = buf[i];
45 buf[i] = ch;
46 }
47
48 printf("\n\nModified test.bak contents:\n\n");
49 for(i = 0; i < s.st_size; i++) {
50 printf("%c", buf[i]);
51 }
52
53
54 munmap(buf, s.st_size);
55 close(fd);
56
57
58
59 return 0;
60 }